![]()
![]()

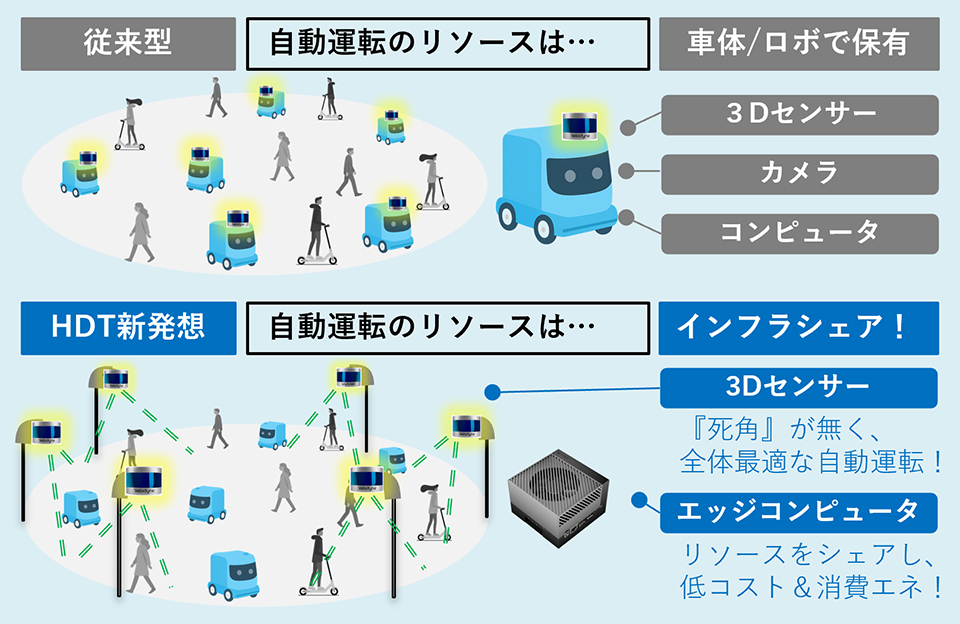
Conventional autonomous mobile robots operating in commercial facilities and logistics sites navigate using a "first-person" perspective, relying on built-in cameras and sensors. In contrast, Hyper Digital Twin Co., Ltd. has developed a "Real-Time Digital Twin Technology" that places the "eyes" and "brains" within the space itself to grasp the environment from a bird's-eye view.
Robots equipped with autonomous driving capabilities via this technology can detect people, obstacles, and dangerous situations in advance, allowing them to navigate while avoiding these hazards. Even at intersections without traffic lights, the system can recognize pedestrians and vehicles from the spatial side, making it suitable for use on public roads and in outdoor spaces between buildings. According to the company's COO, Daiki Hasegawa, they are also proceeding with expansion into micro-mobility, such as senior mobility scooters for ride-sharing, and various working robots to address the challenges of a super-aging society.
 Mr. Toshio Ito, Representative Director and President of Hyper Digital Twin Co., Ltd. (left), and Mr. Daiki Hasegawa, COO (right)
Mr. Toshio Ito, Representative Director and President of Hyper Digital Twin Co., Ltd. (left), and Mr. Daiki Hasegawa, COO (right)Please tell us about your career path leading up to starting this company.
Hasegawa: I was born into a part-time farming family in a rural town called Mitoyo City in Kagawa Prefecture. Growing up in such a laid-back environment, I lived a carefree life without any specific future goals. However, I had some interest in resources and the environment, and the school culture seemed free, so I went on to the Department of Civil Engineering (Geomorphology) at the Kyoto University Faculty of Engineering, and then to the Graduate School of Engineering. When it came to employment, I thought that if I were to join a company as a new graduate, it would be best to go somewhere where I could apply what I studied at university. So, I joined TEPCO (Tokyo Electric Power Company) in April 2011 as a civil engineer.
You joined at a very difficult time, just one month after the Great East Japan Earthquake, didn't you?
Hasegawa: I think it was probably the company with the biggest gap in Japan between the time I received the job offer and the time I actually joined. Immediately after the earthquake, I was in charge of emergency construction work for thermal power plants following the shutdown of nuclear power plants. I was involved in very important work and felt a sense of fulfillment, but I didn't understand anything about the management side, the decisions made by headquarters, or the overall business thinking. Information simply didn't trickle down to engineers on the ground. So, I wanted to properly study—or rather, experience—management and business, which led me to switch careers to a management consulting firm. That was my first major turning point.
If you had joined at a different time, would you have stayed at TEPCO longer?
Hasegawa: I wasn't particularly stability-oriented, so I actually never intended to stay at TEPCO forever from the start. In power companies, when building new power plants or substations, civil engineers are the first to enter the site to handle surveying and other tasks. When I was job hunting, I thought that if the company built power plants overseas, I would be the first to go, and I applied thinking I could work internationally. However, since that opportunity disappeared due to the earthquake, I decided to leave after about two and a half years.
What kind of work did you do at your second company, Deloitte Tohmatsu Consulting?
Hasegawa: Thinking that if I was going to make a fresh start, I should go back to the Kansai region, I looked for a job and happened to find an opening at Deloitte's Osaka office, where I was hired. I really restarted from the bottom, but it was great to experience diverse tasks such as M&A and IT as a generalist. At that time, I vaguely thought, "Maybe I'll become a manager or partner at this company in the future," but about five years later, I moved to ExaWizards Inc.
What was the reason for choosing an AI startup next?
Hasegawa: Through a membership-based recruitment site, I learned they were looking for a leader for the founding members of their West Japan business. I was attracted to the rare chance to build a business from scratch in an early phase, and I also strongly resonated with their mission of solving social issues with AI. I met with the president, talked with him, decided to join immediately, and since then, I focused on expanding the West Japan business as an executive officer.
How did you go from your third company to founding your own?
Hasegawa: During my four and a half years there, we had an office in Kyoto and were conducting joint research with Kyoto University. That's when I met Ryoichi Shinkuma, who was an associate professor at Kyoto University at the time and is now our CTO. After experiencing an IPO as the head of the West Japan business, I wanted to be involved in a new, young company again, so I stepped down as executive officer and was in the incubation room. Around the same time, Shinkuma was moving to Shibaura Institute of Technology, so the conversation turned to "Let's do a company together." In May 2022, Hyper Digital Twin Co., Ltd. was established as the university's first certified venture.
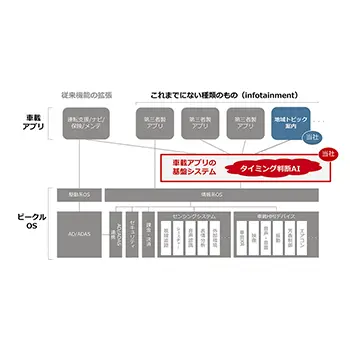
 HDT Technology and Concept
HDT Technology and ConceptWhat becomes possible when utilizing digital twins for robots in real-time?
Hasegawa: Robots operating in commercial facilities or logistics sites generally acquire an initial map beforehand and travel relying on built-in sensors and cameras with that map and route set. This is moving with a "first-person" perspective. So, if they face an irregular situation not on the map—like a cardboard box having been placed in the way—they only decide to "go around" once it enters their field of vision.
Our "Infrastructure-Controlled Robot Autonomous Navigation" concept adopts a method where "eyes" and "brains" are placed in the space to grasp the environment from a bird's-eye view. Because it can detect obstacles or crowds of people in advance and select the optimal route, it becomes possible to avoid congestion and prevent obstruction of work tasks.
Above all, the biggest advantage is that it can realize highly accurate and safe autonomous operation. For example, it can predict dangers without blind spots, such as a person running out from around a corner, and take measures like slowing down or stopping in advance.
Why hasn't the idea of outsourcing autonomous driving functions existed or been realized until now?
Hasegawa: Traditional efforts in autonomous driving support have relied on the collaboration of multiple companies. For example, in a case where a camera is installed on a utility pole to warn of danger in the opposite lane, it doesn't work with just an automaker or just a telecom/power company. Because of this complexity, support systems alone haven't spread widely, which likely limited the scope of autonomous driving activity.
What method did you use to solve such problems?
Hasegawa: There are various ways, but our method is quite simple. By installing sensors called LiDAR on the spatial side (infrastructure), we directly acquire physical space information and transmit it to the robot. This ensures versatility and allows for a wide range of support. Furthermore, based on that accumulated spatial data, we can detect people and obstacles and utilize them for AI. I believe we have a unique advantage that is difficult for other methods to achieve: we can incorporate the evolution of AI while demonstrating a unique strength that doesn't rely entirely on AI.
What about the technical aspect?
Hasegawa: Because multiple technical domains are involved—such as edge computing, AI, robot control, and communication—overall design becomes difficult. If you try to do everything in-house, the technical difficulty is extremely high. In that respect, our company leverages the expertise in control systems of our CEO, Toshio Ito, to connect everything from data acquisition to edge processing, AI analysis, and robot control end-to-end, achieving high speed and creating a solution.
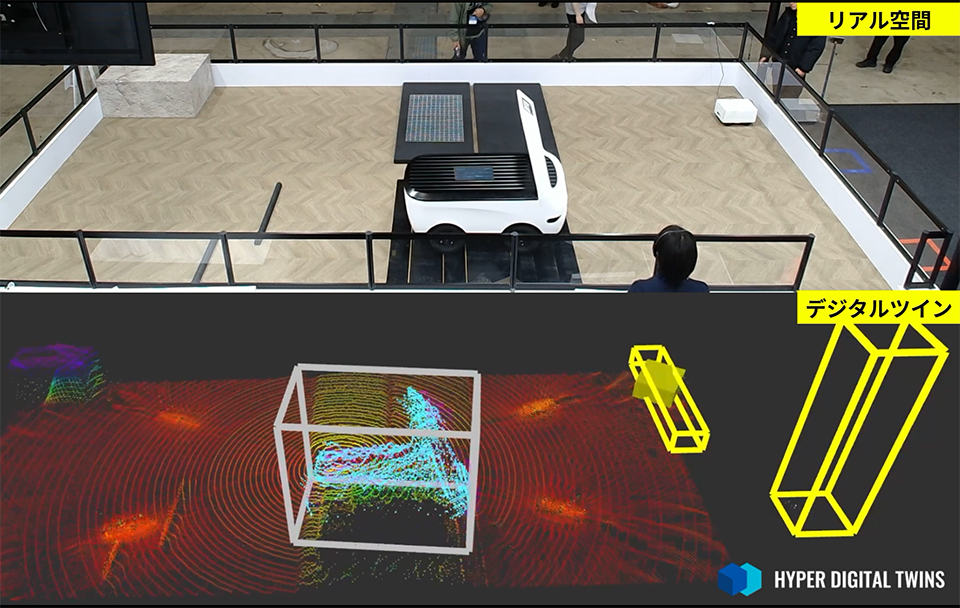
Regarding information processing speed, a delay of even seconds can lead to fatal issues like accidents. Therefore, real-time performance—gathering data, making judgments, and reflecting them in control with low latency faster than human reaction speed—is crucial. The "LiDAR" technology we use acquires data as a collection of points, which is large and heavy, making real-time processing usually difficult. However, our technology makes it possible to integrate multiple LiDAR sensors into a single space, process it in real-time, and return instructions to the robot.
 Exhibition at the International Robot Exhibition
Exhibition at the International Robot ExhibitionIn January of this year, a demonstration experiment of automatic robot control crossing a road was conducted at "Haneda Innovation City," a large-scale complex adjacent to Haneda Airport, correct?
Hasegawa: We had been allowed to permanently install our sensors at Haneda Innovation City for some time. Since they became usable, we discussed conducting a verification. We utilized them for robot control in collaboration with Kajima Corporation, Haneda Mirai Development Co., Ltd., and Shibaura Institute of Technology.
How will you connect this to future research and development?
Hasegawa: Originally, autonomous vehicles were responsible for transport within specific areas. However, there was a constraint where robots couldn't safely cross crosswalks without traffic lights when moving between areas, limiting operation to single areas. If a single robot can operate across multiple areas, the range of activity expands, and transport efficiency improves. To achieve this, we will introduce a mechanism that senses the environment, detects the presence of people or vehicles, and instructs the robot "safe to cross" (proceed). In the future, we will cooperate with Kajima Corporation to conduct joint demonstrations aimed at realizing smart cities, including operations on public roads and spaces between buildings.
Furthermore, I hear it will also be utilized for micro-mobility and automobiles?
Hasegawa: First, we are prioritizing utilization in a wide range of sites such as factories, warehouses, and commercial facilities, targeting low-speed mobility and delivery robots that can travel on sidewalks at speeds of 6 km/h or less. After that, we plan to proceed gradually in the medium to long term with connections to infrastructure such as intersections and coordination with automobiles.
Are there factories or facilities where introduction is already underway?
Hasegawa: Yes, there are. We exhibited jointly with Suzuki Motor Corporation at the "2025 International Robot Exhibition" held at Tokyo Big Sight from December 3rd to 6th.
We performed a demonstration of "Infrastructure-Controlled Autonomous Navigation" utilizing real-time spatial data, unveiling it on a large scale for the first time. Consideration for utilization at Suzuki Motor Corporation's factories is also progressing. Currently, we are receiving inquiries from factories and companies wishing to introduce the system, so we plan to bring it to a state where it is actually introduced and running by next year.
I understand this can also be adapted as a measure for the super-aging society?
Hasegawa: If we consider the sharing of electric scooters that elderly people can drive themselves, there are "last mile" challenges such as drop-off locations and the hassle of collection. If we have a mechanism where the mobility vehicle automatically returns and charges itself, or comes to a designated location when called, waiting at the station and efficient operation become possible. This could build a new form of ride-share model. We are currently holding discussions with local governments and proceeding with the verification of its value through demonstration experiments.
Also, since current sharing systems allow users to return vehicles to any port, inventory imbalances occur between locations, leading to high operating costs for truck transport to adjust the number of units. If we introduce a mechanism that encourages automatic return to each port, where the mobility vehicle itself judges the optimal return destination and moves there, we can expect a reduction in the burden of shuttle transport and costs.
How do you want to lead the company to success?
Hasegawa: Our mechanism is a reversal of conventional thinking, so people might think it will take time to permeate society. However, things that were rare when they first appeared, like past robots or Wi-Fi, gradually became infrastructure. In the same way, I believe our mission is to make this widespread in the world as quickly as possible.
The ultimate image of society we aim for is one where the introduction of robots reduces the burden on people, increases safety, and creates a better working environment. Furthermore, since this business can be expanded regardless of language, after succeeding in Japan, an advanced aging nation, I want to contribute to improving the labor force in overseas countries aiming for growth or facing labor shortages.
Additionally, I want to organize the company as a place where university students can jump into a venture and grow. To that end, internally, I want to emphasize building a virtuous cycle where the founding engineers and current young employees continue to be active, experience success, and create new things from there. I strongly desire to expand future options for entrepreneurship and research by showing that even a university-born venture can achieve great success and profit in a short period.
 Infrastructure-Controlled Autonomous Navigation Demo
Infrastructure-Controlled Autonomous Navigation DemoEditor's Note
Mr. Hasegawa, currently serving as COO, says, "The mission of turning technology into business is extremely difficult, which is exactly why it has value." Companies often don't know how to use technology, while engineers find the burden of proposing usage and educating clients to be heavy. He also realized after starting the business that if engineers also handle management, resources get scattered; it is sometimes better if they can focus on their original research and development. He is convinced that by taking on the role of connecting the two with his experience on both the engineer and corporate sides, and by handling the business aspects single-handedly, they can send better products out into the world faster.
■ICT Startup League
A support program started in FY2023, triggered by the Ministry of Internal Affairs and Communications' "Startup Creation-type Budding Research and Development Support Project."
The ICT Startup League supports startups through four pillars:
1. R&D Funding / Hands-on Support
Up to 20 million yen in R&D funding is provided in the form of grants. In hands-on support, the selection evaluation committee members who were involved in selecting the league members stay close after selection to promote growth. For companies that the evaluation committee members rated as "definitely want to adopt," a support system likened to "Oshi-katsu" (supporting one's favorite) is built, where the committee members themselves provide continuous support such as advice on business plans and providing growth opportunities.
2. Discovery & Incubation
We provide opportunities for learning and networking to promote the business growth of league members.
We also deploy efforts to discover people aiming to start businesses in the future, aiming to expand the base.
3. Competition & Co-creation
It serves as a place for positive competition like a sports league, where startups learn together and improve themselves through friendly rivalry to win the necessary funding (up to 20 million yen). We also provide a place for co-creation where league members collaborate to expand their businesses through various opportunities such as sessions by selection evaluation committee members.
4. Dissemination
We will disseminate the initiatives of league members in cooperation with the media! By letting many people know about the businesses, we aim to expand new matching and chance opportunities.
■Related Websites
Hyper Digital Twin Co., Ltd.
/
Hyper Digital Twin Co., Ltd. (LEAGUE MEMBER)
/
ICT Startup League
💡 Read Next
After exploring the on-the-ground stories of our startups, discover the "big picture" from the top leaders driving Japan's startup ecosystem.
▶︎ Experts Discuss How Startups Should Compete in the Future
For more details on STARTUP LEAGUE's startup support, please see here.